Project Altair from IUT proceeds to the European Rover Challenge's finals

Published :
Updated :
 For all latest news, follow The Financial Express Google News channel.
For all latest news, follow The Financial Express Google News channel.
For the second time, Project Altair from the Islamic University of Technology (IUT) in Bangladesh has made its way to the finals of the prestigious European Rover Challenge (ERC) 2024. Out of 69 teams worldwide from 23 countries, only 27 have made it to the final round, with Project Altair ranking 23rd globally.
Being the top team from Bangladesh and the third-best in Asia, they have certainly created the capacity for Bangladeshi engineers to dream big. Before Project Altair, IUT had displayed tremendous success nine consecutive times by proceeding to the ERC finals each year through their teams Anirban and Avijatrik.
The other team from Bangladesh, Team Interplanetar from BUET, has advanced to the finals as well, and the two teams will be participating in the finals from 6th to 8th September 2024, hosted by AGH University of Krakow in Poland.
The European Rover Challenge, or ERC, is an annual competition that serves as a platform for teams from many countries to demonstrate their competence in designing operational rovers capable of navigating the rough Martian landscape and performing complex tasks.
The onsite tasks are autonomous navigation, picking and placing objects (probing task), controlling an electrical panel (maintenance task), building a wall (construction task), deep soil drilling, autonomous droning, and scientific exploration, where findings from the Martian surface need to be reported.
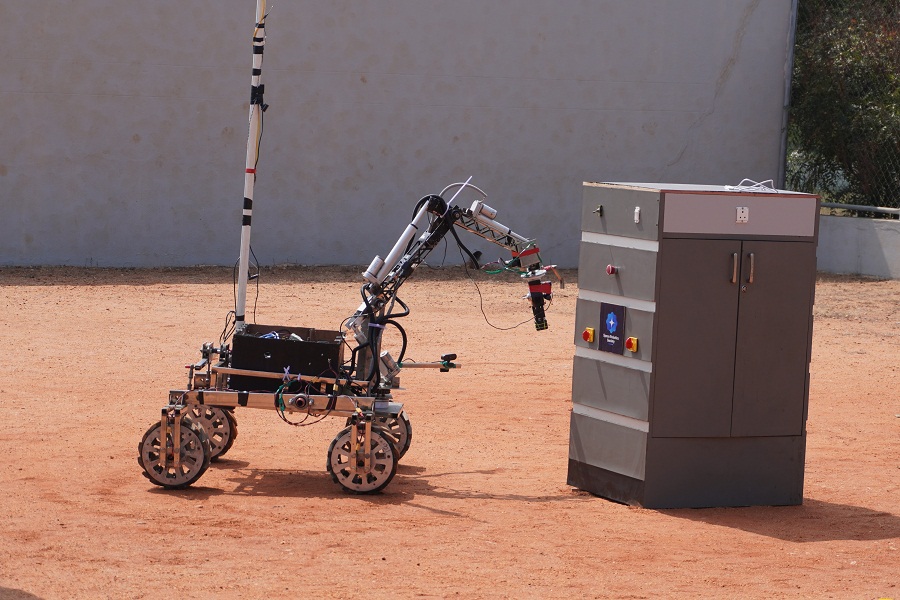
The tasks are complicated; a sophisticated machine is required to execute them. As such, Project Altair has patiently persevered to perfect Musafir, a rover expected to one day traverse the harsh terrains of Mars. Citing the rover's current status, Mohammad Emon, the current team lead, explained, "Musafir's current manipulator subsystem is a 5-DOF robotic arm made of worm gears, actuators, laser-cut stainless steel, and 3D-printed parts. The chassis is also stainless steel, with CNC-cut aluminium wheel assemblies and rubber padding, using a bar differential for suspension."
The team further explained that the deep soil drill employs a ball screw mechanism and auger for soil collection, with ongoing work on its collection and autonomy.
Communication between the rover and the base station uses a 5 GHz bandwidth. When asked about future ambitions, "We are progressing towards full autonomy, utilizing SLAM algorithms for navigation. Our plan includes implementing a corner steering system, inverse kinematics for the arm, and making the rover more mechanically rigid and lightweight."
Despite being one of the most sought-after STEM degrees, students from Bangladesh seldom see the physical manifestation of engineering concepts.
The chasm between textbook knowledge and physical implementation is ever-present, and more needs to be done to address this gaping void. The former team lead, Shantanu Rahman, shared his concerns, "As the team lead, I have always tried to make this (the rover team) a better place for engineers. It is tough for an average engineering student in Bangladesh to practise practical engineering."
The dedication and proficiency of both teams have stood the test of time. They have consistently showcased their extraordinary expertise and are sure to preach the potential of Bangladesh on a global scale in the upcoming finals.
fawziyaosman141@gmail.com